Fraunhofer-Gesellschaft
Fraunhofer-Gesellschaft 
Self-Sensing-Aktor auf Basis von Formgedächtnislegierungen
Motivation
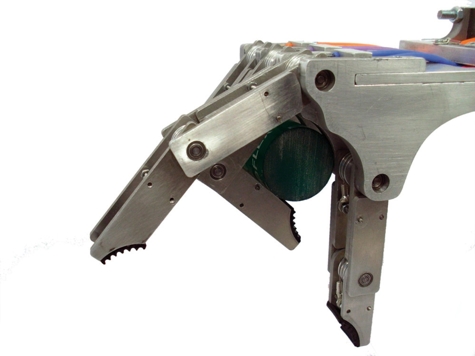
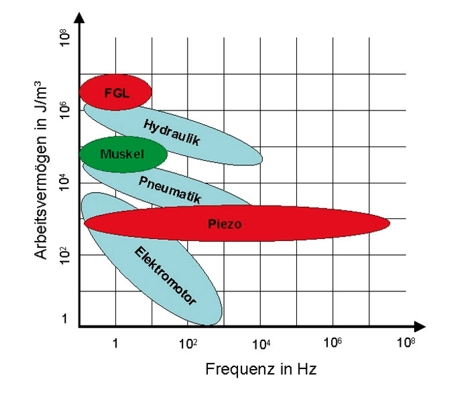
Der aktorische Einsatz thermischer Formgedächtnislegierungen (FGL) rückt aufgrund der deutlichen Verbesserungen der Werkstoffeigenschaften immer mehr in den Fokus der anwendungsorientierten Forschung. Die Hauptvorteile sind dabei in dem hohen spezifischen Arbeitsvermögen im Vergleich zu anderen Aktorprinzipien und der sehr guten strukturellen Integrierbarkeit zu sehen. Neben den Möglichkeiten des Einsatzes derartiger Aktoren im Bereich der Werkzeugmaschinen und der Fahrzeugtechnik, welche zwei Schwerpunkte des Fraunhofer IWU darstellen, erlauben die Formgedächtnismaterialien auch medizintechnische Applikationen. Aktuell werden thermische FGL auf ihre Anwendung als Aktoren für die Exoprothetik untersucht. Das Hauptanliegen der Arbeiten am Fraunhofer IWU ist hierbei die Entwicklung eines sensorlosen Antriebs- und Steuerungskonzeptes zur Ergänzung vorhandener Antriebssysteme von Fremdkraftprothesen.